| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
EINRICHTEN
![]()
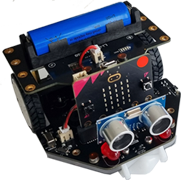
ZUSAMMENBAU |
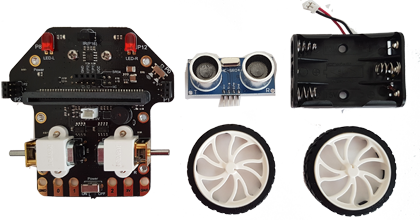
Der Maqueen Bausatz enthält eine 8 x 8.5 cm grosse Platine, an der bereits Motoren, LEDs, Infrarot- und Ultraschalsensoren und weitere Komponenten eingebaut sind.
|
|
|
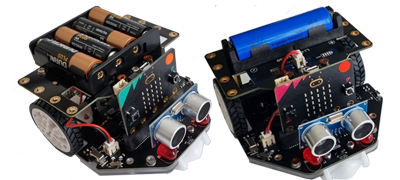
Eine aufladbare Batterie ist vorteilhaft. Zusätzlich muss ein micro:bit V2 beschafft werden.
|
Einige Tipps zur Beschaffung |
FIRMWARE INSTALLIEREN |
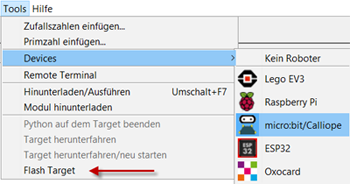
Die Programme werden mit TigerJython entwickelt, via USB-Kabel auf den micro:bit des Roboters hinunterladen und dort mit Python ausgeführt. Vor der ersten Verwendung muss du auf dem micro:bit eine Firmware installieren.
Für ältere WIndows Versionen (< 10) muss du einen Treiber installieren (mbed.zip) Hast du Schwierigkeiten beim Flashen vom micro:bit V1 auf einem Mac-Computer? Teste die Installation mit dem folgenden Programm: from mbrobotimport * forward() delay(2000) stop() |
MAQUEEN_PLUS UND MAQUEEN_PLUS V2 |
TigerJython unterstützt auch die Modelle Maqueen Plus und Maqueen PlusV2. Praktisch alle Musterbeispiele und Aufgaben in diesem Lehrgang können auch mit diesen Robotern ausgeführt werden. Leider ist die Hardware der drei Maqueen-Roboter unterschiedlich und es sind daher drei verschiedene Bibliotheken (Module) erforderlich. Das Modul mbrobot wird beim Flashen vom micro:bit automatisch auf den micro:bit kopiert. Die Module mbrobot_plus bzw. mbrobot_plusV2 musst du zusätzlich auf den micro:bit herunterladen. Dabei gehst du wie folgt vor:
from mbrobot_plus import * #from mbrobot_plusV2 import * forward() delay(2000) stop() Der Roboter soll 2000 Millisekunden geradeaus fahren. Die Module mbrobot_plus.py und mbrobot_plusV2.py findest du auch unter den Zusatzmodulen (TigerJython /Hilfe/APLU Dokumentation / microbit /Zusatzmodule). Du kannst jeder Zeit die neueste Version downloaden und auf den micro:bit kopieren. |
Fachliche Hinweise:Maqueen Bausatz
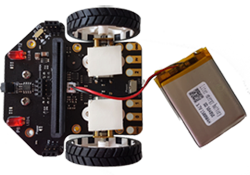
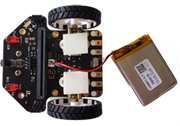
Zusätzlich muss man einen micro:bit und drei AA (1.5 V) Batterien beschaffen. Bei den aufladbaren Batterien sollte man unbedingt Nickel-Zink-Batterien wählen, da nur diese 1.5 V abgeben.. Wir empfehlen, anstelle der drei Baterien, eine Lipo-Akku-Batterie (3.7 V, 1.5 Ah) zu beschaffen und diese an den Motoren mit einem doppelseitigen Klebband zu befestigen.
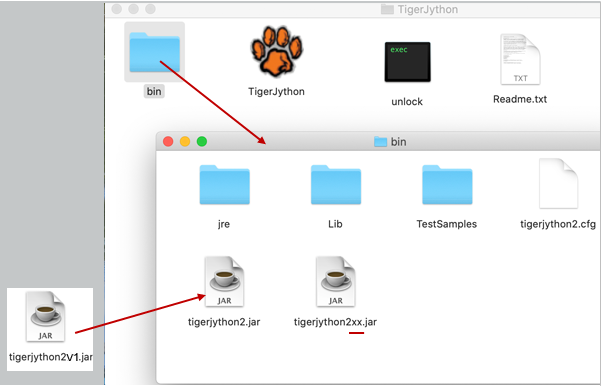
micro:bit V1 mit MacOS flashenMacOS kann mit Tools / Flash Target nicht automatisch die Versionen V1 und V2 unterscheiden. Falls Sie noch die alte Version des micro:bis haben, gibt es zwei Möglichkeiten, ihn zu flashen: 1) Sie flashen ihr micro:bit V1 auf einem Windows Computer. Dann können Sie weiter normal auf dem Mac-Rechner arbeiten. Alles andere funktioniert problemlos. 2) Sie laden eine TigerJython-Version herunter, die micro:bit V1 aber nicht micro:bit V2 flashen kann:
Fachliche Hinweise:Was tun, wenn der Roboter bei der Ausführung des Befehls forward() nicht geradeaus fährt? Es gibt zwei Möglichkeiten, das Problem zu beheben: 1) Du lässt den Roboter in der Regel auf dem Streifen fahren, damit er mit seinen Infrarot-Sensore die Fahrtrichtung selbst korrigert. 2) Du kannst die Fahrtrichtung aber auch im Modul, welches importiert wird, optimieren. Nach einigen Versuchen findest du den richtigen Faktor für deinen Roboter. Du kannst selbstverständlich jeder Zeit wieder die Original-Version des Moduls von unserer Website herunterladen und auf deinen micro:bit herunterladen.
|