| Deutsch English |
![]()
ASSEMBLY |
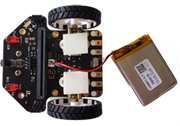
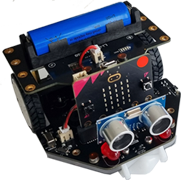
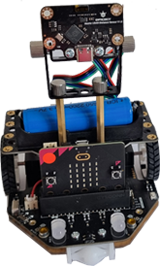
The Maqueen kit contains an 8 x 8.5 cm circuit board on which motors, LEDs, infrared and ultrasonic sensors and other components are already installedd.
|
|
|
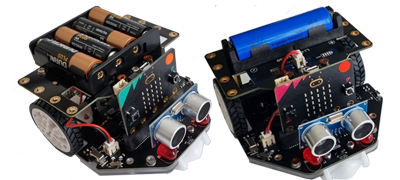
A rechargeable battery is advantageous. A micro:bit V2 must also be purchased.
|
INSTALL FIRMWARE |
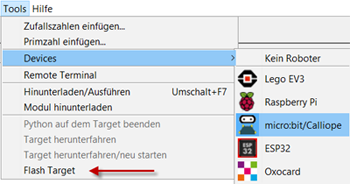
The programs are developed with TigerJython, downloaded to the robot's micro:bit via USB cable and executed there with Python. You must install firmware on the micro:bit before using it for the first time.
Test the installation with the following program:
|
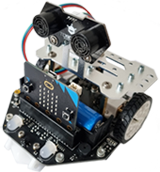
MAQUEEN PLUS, MAQUEEN PLUS V2, MAQUEEN PLUSV3 |
TigeJython also supports the Maqueen Plus, Maqueen PlusV2 and Maqueen Plus V3.. All sample examples and tasks in this tutorial can also be carried out with these robots. Unfortunately, the hardware of the three Maqueen robots is different and therefore three different libraries (modules) are required. The mbrobot module is automatically copied from the micro:bit to the micro:bit when it is flashed. The mbrobot_plus and mbrobot_plusV2 modules must also be downloaded to the micro:bit. Proceed as follows:
The robot drives straight ahead for 2000 milliseconds. The modules mbrobot_plus.py, mbrobot_plusV2.py and mbrobot_plusV3.py can also be found under the additional modules (TigerJython /Help/APLU Documentation / microbit /Additional modules). You can download the latest version at any time and copy it to the micro:bit. |
Technical notes:micro:bit V1 has very little memory. With the older version of the mbrobot library, everything works except for the calibration of the motors. To use the older library, proceed as follows: - Install the firmware according to the description in the next section
|