| |
Beispiel 1: Funktionalität des Servomotors testen
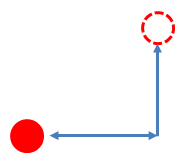
Der Servomotor bewegt den Loader zuerst zur Ausgangslage (unten), dann wird die Schaufel nach oben gedreht und kehrt nach 2000 Millisekunden nach unten in die Ausgangslage.
Mit dem Befehl setServo("S1 ", 160) dreht der Servomotor an die Position mit dem Drehwinkel 160°. S1 ist der Anschluss Port. Führe das unten stehende Programm mit verschiedenen Winkeln zwischen 0 und 180° aus um herauszufinden, für welchen Wert sich die Schaufel in der Ausgangslage (unten) befindet. |
|

|
|
from mbrobot_plus import *
#from mbrobot import*
setServo("S1", 160)
delay(2000)
setServo("S1", 100)
delay(2000)
setServo("S1", 160)
Beispiel 2: Mit Ultraschallsensor den Loader positionieren
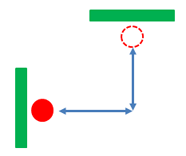
Der Roboter soll einen Gegenstand, der sich bei einer senkrechten Wand befindet aufladen und wegtransportieren
(ähnlich wie im oben stehenden Video). Um den Abstand zur Wand zu messen, verwendest du den Ultraschallsensor.
|
from mbrobot_plus import *
#from mbrobot import *
setServo("S1", 160)
setSpeed(20)
forward()
repeat:
d = getDistance()
print(d)
if d < 12:
stop()
delay(1000)
setServo("S1", 100)
setSpeed(20)
backward()
delay(4000)
stop()
setServo("S1", 160)
delay(100)
Die Distanz zur Wand wird in einer "endlosen" repeat-Schleife alle 100 Millisekunden abgefragt. Ist sie kleiner als 12 cm, wird der Gegenstand aufgeladen.
|