| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
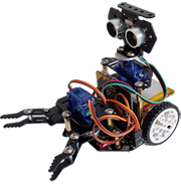
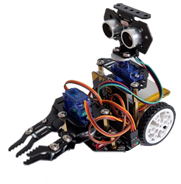
14. Greifarm mit Servomotor (Mechanic Beatle)
![]()
Neues TigerJython (ab Version 2.28) erforderlich.
DU LERNST HIER... |
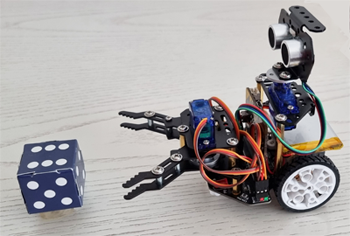
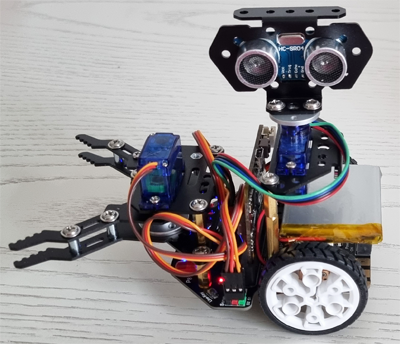
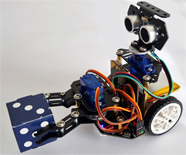
einen Greifarm (Maqueen Mechanic Beatle) an deinen mbRoboter anschliessen und mit einem Servomotor steuern. Der Greifarm kann leichte Gegenstände packen und transportieren.
|
GREIFARM ZUSAMMENBAUEN |
|

|

MUSTERBEISPIELE |
from mbrobot import * #from mbrobot_plus import * setServo("S1", 95) delay(1000) setServo("S1", 60) delay(1000) setServo("S1", 95)
from mbrobot import * #from mbrobot_plus import * setServo("S1", 95) delay(1000) setServo("S1", 60) forward() delay(1000) stop() setServo("S1", 95) backward() delay(500) left() delay(700) stop() setServo("S1", 60) Beispiel 3: Mit Ultraschallsensor den Greiarm positionieren
from mbrobot import * #from mbrobot_plus import * setServo("S1", 60) forward() repeat: d = getDistance() print(d) if d < 20: stop() delay(500) setServo("S1", 95) delay(500) backward() delay(2500) left() delay(700) stop() setServo("S1", 60) delay(100) Die Distanz zur Wand wird in einer "endlosen" repeat-Schleife alle 100 Millisekunden abgefragt. Ist sie kleiner als 20 cm, hält der Roboter an und packt den Gegenstand mit seinem Greifarm. Beispiel 4: Ultraschallsensor mit Servomotor drehen
from mbrobot import * #from mbrobot_plus import * setServo("S2", 90) delay(2000) setServo("S2", 0) delay(2000) setServo("S2", 90) delay(2000) angle = 90 while angle >= 0: setServo("S2", angle) delay(500) angle = angle - 10 angle = 0 while angle <= 90: setServo("S2", angle) delay(500) angle = angle + 10 Das Programm zeigt, wie man den Ultraschallsensor mit einem zweiten Servomotor von der frontaler Position in eine Position, die parallel zur Fahrtrichtung ist drehen kann. Zuerst in einem Schritt und dann in kleinen Schritten. |
MERKE DIR... |
Der Servomotor wird mit dem Befehl setServo(Port, Winkel) um den gewünschten Winkel gedreht, wobei du für den erste Parameter S1 oder S2 und den Winkel eine Zahl zwischen 0 und 180 wählen kannst. Der Servomotor bewegt gleichzeitig beide Arme. Am Port S2 kannst du einen zweiten Servomotor anschliessen, mit dem du den Ultraschallsensor drehen kannst. |
ZUM SELBST LÖSEN |
|
Fachliche Hinweise:
In der Regel entspricht die Position nach vorne dem Winkel 90 und die Positionen auf die rechte bzw. linke Seite den Winkeln 0 bzw. 180. Wenn es nicht der Fall ist hast du zwie Möglichkeiten
1) Du änderst die Winkel in deinem Programm, so dass die Richtung stimmt (z.B. 110 statt 90 und 20 statt 0)
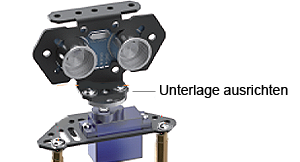
2) Du kannst aber auch zuerst den Befehl setServo("S2", 90) ausführen. Dann den Sensor kurz abschrauben und die runde Unterlage so aufsetzen, dass du den Sensor danach exakt frontal anschrauben kannst..
![]()