![]()
ZUSAMMENBAU |
|
Die beiden Bausätze Callibot und Motion Kit 2 enthalten eine 8 x 8.5 cm grosse Platine, an der bereits Motoren, LEDs, Infrarot- und Ultraschalsensoren und weitere Komponenten eingebaut sind. Der Zusammenbau ist sehr einfach, beansprucht nur wenige Minuten. Zusätzlich muss man einen Calliope mini und drei AA Batterien beschaffen. Bei neuen Beschafungen empfehlen wir den Calliope mini 3 zu beschaffen. Dieser verfügt über eine USB 3 Schnittstelle, mit der die Programme schneller heruntergeladen werden.. |
FIRMWARE INSTALLIEREN |
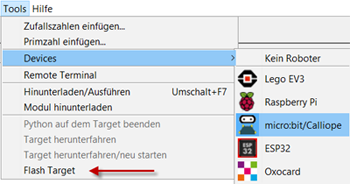
Vor der ersten Verwendung muss du auf dem Calliope eine Firmware installieren. Diese ist notwendig, um Python-Programme auf dem Calli:bot auszuführen. Die Firmware wird mit TigerJython via USB-Kabel auf den Calliope des Roboters hinunterladen. Falls du die Entwicklungsumgebung TigerJython noch nicht installiert hast, lade die Installationsdatei von tjgroup.ch/download heruter und installiere sie im beliebigen Verzeichnis auf deiner Ferstplatte.
Für ältere WIndows Versionen (< 10) muss du einen Treiber installieren (mbed.zip) Die Programme für den Callibot kannst du auch mit dem WebTigerPython entwickeln, der keine lokale Installation benötigt und nur im Webbrowser auch auf iPads und Tabletts läuft. Die Online-Version ersetzt aber nicht vollständig den lokal installierten TigerJython. Es fehlt die Roboter-Simulation. Die Programmcodes sind aber kompatibel. Die Online erstellten Programme kannst du problemlos mit TigerJython weiter bearbeitet. |
![]()