| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
TIPPS ZUR BESCHAFFUNG
![]()
WELCHES MODELL ? |
|
|
|
|
|

|

|

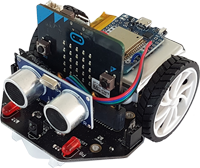
MBROBOT MIT ESP32-COPROZESSOR UND WLAN |
|
|
|
|
|
|
|
Fachliche Hinweise:
ESP32 Microcontroller installieren
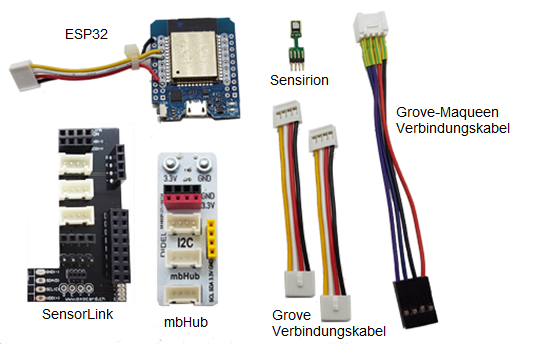
Zusätzliche Hardware-Komponenten (Bezugsquelle: www.bastelgarage.ch)
• |
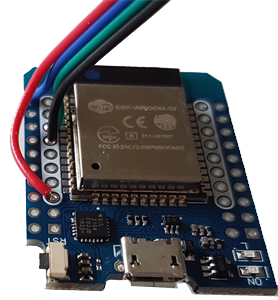
WEMOS ESP32 MiniKit (Es gibt billigere Klone, z.B. auf |
 |
| • | Anschlusskabel Jumper kabel Dupont 4 pin oder 4 Einzelkabel female-female (20 cm) |
 |
• |
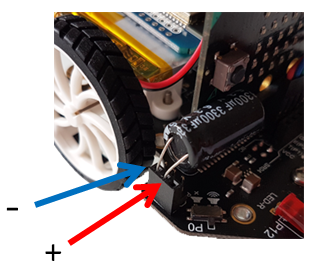
Elektrolytkondensator
|
 |
|
USB Lötkolben BT-8U 8W (billig und von uns erprobt)
|
 |
Vorgehen:
1. |
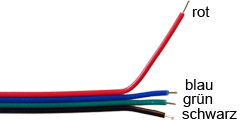
Die Kabel auf die richtige Länge zuschneiden. Das rote Kabel ist ca. 8.5 cm lang, die übrigen 1 cm kürzer. (Die Farben dienen nur zur Orientierung) |
|
|
Alle Kabel am Ende ungefähr 3 mm mit einem Japanmesser oder einem Abisolierwerkzeug abisolieren (die Litzen nicht verletzen) |
|
|
 |
 |
|
|
|
4. |
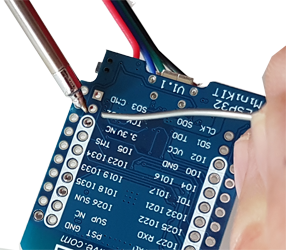
Auf der Rückseite zwei kleine Streifen Doppelklebband anbringen |
|
5. |
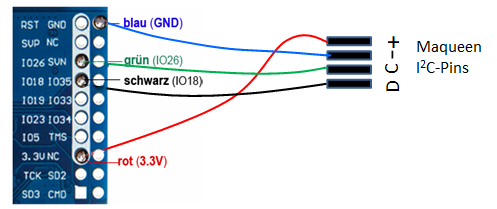
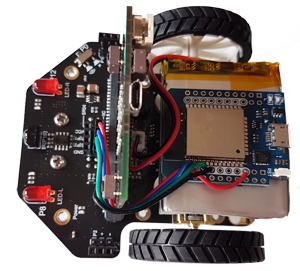
Das ESP32-Board auf die Lipo Batterie kleben, die Kabel um den micro:bit herumziehen und vorne einstecken. Achte auf die korrekte Anschlussreihenfolge (siehe Verdrahtungschema)
|
|

7. |
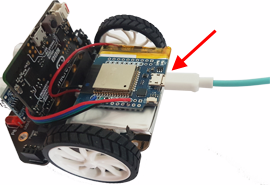
Firmware installieren
|
|
|
• | Man kann prüfen, ob der ESP richtig erkannt wird |
|
• | In TigerJython unter Tools/Devices ESP32 wählen und diesen Port eingeben (z.B. COM3) Bemerkung: Mit der neuesten Mac-Version (V 10.15) funktioniert das Flashen nicht. Wir empfehlen die ESP mit einem Windows-Rechnet oder Mac-Rechner mit einer älteren Version zu flashen. |