| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
8. MAGNETFELD- UND GYROSENSOR
![]()
DU LERNST HIER... |
wie du mit dem Calliope das Magnetfeld bestimmen kannst und wie ein Gyrosensor funktioniert. |
SENSORWERTE ANZEIGEN |
|
Der Magnetfeld- und der Gyrosensor sind hardwaremässig im Lagesensor-Chip integriert. Der Magnetfeldsensor gibt die aktuellen x-, y-, und z-Komponenten der Magnetfeldes an der Stelle des Sensors zurück. Mit get_x(), get_y() und get_z() kannst du die einzelnen Komponenten abfragen. Die Werte liegen zwischen -32768 und 32767. from calliope_mini import * while True: bx = magnetometer.get_x() by = magnetometer.get_y() bz = magnetometer.get_z() print(bx, by, bz) sleep(500) |
MUSTERBEISPIELE |
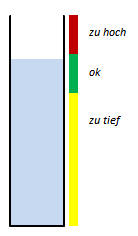
Minen suchen
Du verwendest den Befehl magnetometer.get_z(), der die Stärke des Magnetfeldes in der Vertikalen zurückgibt. Dann skalierst ihn so, dass du einen Helligkeitswert zwischen 0 und 9 erhältst. In der Funktion light(v) schaltest du alle LEDs miteinander an.
|

MERKE DIR... |
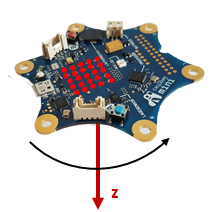
Der Magnetfeldsensor kann zum berührungslosen Erfassen der Position eines Magneten oder einer Magnetspule verwendet werden. Mit dem Gyrosensor wird die Rotationsgeschwindigkeit bestimmt. |
ZUM SELBST LÖSEN |
|
Didaktische Hinweise:
Die hier gezeigte Lösung verwendet das Programmierparadigma "Zustandsprogrammierung" (state programming), wie es im Zusammenhang mit Automaten (state machines) weit verbreitet ist.
Dabei ist wichtig, dass nur Zuständsänderungen erfasst werden. Die Programmierung mit einer mehrfachen ifelse-Struktur ist nicht selbstverständlich und muss speziell trainiert werden.