| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
10. FAHRENDE ROBOTER
![]()
DU LERNST HIER... |
wie du einen fahrenden Roboter zusammenbauen und programmieren kannst. |
ROBOTER "CALLI:BOT" |
|
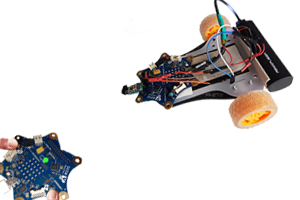
ROBOTER "CALLIOPY" |
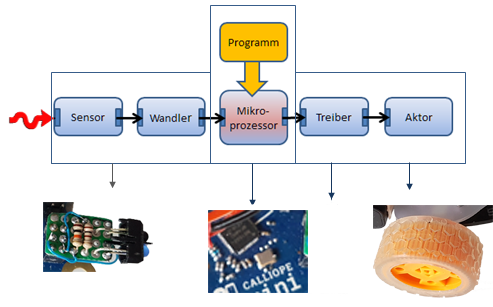
Das folgende Blockbild für eine automatisierte Maschine ist darum sehr allgemein gültig und du erkennst diese Komponenten leicht bei deinem Calliopy-Roboter.
Da der Calliope in der Maschine integriert ist, nennt man sie auch ein "eingebettetes System" (embedded system). |
ANSTEUERUNG VON DC-MOTOREN |
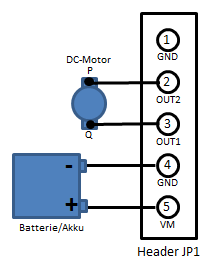
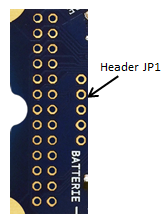
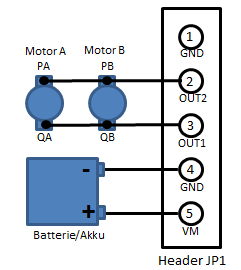
Ein DC-Motor (DC = Direct Current = Gleichstrom) besitzt zwei Anschlüsse P und Q. Legt man eine Gleichspannung mit dem Pluspol an P und dem Minuspol an Q, so dreht er in der einen Richtung, und zwar umso schneller, je höher die Spannung ist. Kehrt man die Polarität um, so dreht er in der anderen Richtung. Zur Ansteuerung eines Motors (oder anderer Verbraucher mit bis zu maximal 1 A Strom) hat der Calliope einen Stromverstärker (H-Brücke DRV8887), dessen zwei Ausgänge mit Pin 2 und Pin 3 des Headers JP1 verbunden sind. Pin 5 ist der Eingang einer externen Spannung bis maximal 10 V zur Versorgung der des Motors und Pin 1 und Pin 4 sind Masseanschlüsse (GND = Ground). Einen einzelnen Motor hängst du wie folgt an:
Als Batterie/Akku kannst du eine PowerBank verwenden, die eine Spannung von 5V abgibt. Dazu ein kurzes USB-Kabel auftrennen und die 5V separat herausführen.
(Falls du einen ganz kleinen Motor hast, der bei 3.3V nicht mehr als 20 - 30 mA zieht, kann die externe Spannungsquelle entfallen, da der Calliope dann automatisch die interne Spannungsversorgung verwendet.) Der Stromverstärker wird mit den Prozessorpins 29 und 30 angesteuert, wobei du mit dem Pin 28 den Verstärker einschaltest. Dies ergibt folgende Schaltungslogik für die 0/1-Pegel der Prozessorpins.
x: 0 oder 1 hat keine Auswirkung, vorwärts und rückwärts hängen vom Einbau des Motors ab. Mit dem folgenden Programm dreht der Motor je 5 Sekunden vorwärts und rückwärts bevor er stoppt. Programm: from calliope_mini import * def move(): pin28.write_digital(1) pin29.write_digital(1) pin30.write_digital(0) def rewind(): pin28.write_digital(1) pin29.write_digital(0) pin30.write_digital(1) def stop(): pin28.write_digital(0) move() sleep(5000) rewind() sleep(5000) stop() Es ist erstaunlich, dass du mit dieser Schaltung sogar die Rotationsgeschwindigkeit des Motors wählen kannst. Wenn du nämlich den Pin 28 nur während einer bestimmten Zeit einschaltest und dann wieder ausschaltest, so dreht der Motor langsamer. Dazu verwendest du den Befehl pin28.write_analog(v) mit einem Wert v = 0..1023. Im folgenden Programm dreht der Motor mit wählbarer Geschwindigkeit v (im Bereich 0..1023). Programm: from calliope_mini import * def move(): pin28.write_analog(v) pin29.write_digital(1) pin30.write_digital(0) def revind(): pin28.write_analog(v) pin29.write_digital(0) pin30.write_digital(1) def stop(): pin28.write_digital(0) v = 500 move() sleep(5000) rewind() sleep(5000) stop() |



VERWENDUNG VON DC-MOTOREN |
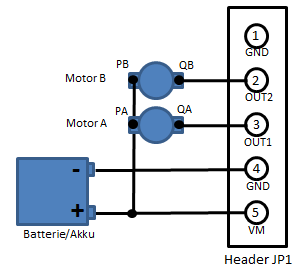
Leider besitzt der Calliope nur eine einzige H-Brücke. Willst du zwei Motoren verwenden, wie dies bei einem üblichen Rover der Fall ist, so musst du Kompromisse eingehen. Du kannst die Motoren entweder gleichzeitig vorwärts bzw. rückwärts laufen lassen, indem du sie parallel schaltest: Wenn du den einen Motor zwischen OUT1 und VM und den anderen zwischen OUT2 und VM hängst, kannst du die beiden Motoren unabhängig voneinander vorwärts schalten. Wenn der Pegel von OUT1 auf GND liegt, läuft Motor A vorwärts, wenn OUT2 auf GND liegt, läuft Motor B vorwärts. Es ergibt sich also folgende Schaltungslogik:
Sind die beiden Motoren in einem 2 rädrigen Rover eingebaut, so bewegt sich dieser mit folgendem Programm zuerst vorwärts, dann dreht er auf die eine Seite und dann auf die andere Seite. Schliesslich bewegt er sich wieder vorwärts und stoppt. Programm: from calliope_mini import * def forward(): pin28.write_analog(v) pin29.write_digital(1) pin30.write_digital(1) def left(): pin28.write_analog(v) pin29.write_digital(0) pin30.write_digital(1) def right(): pin28.write_analog(v) pin29.write_digital(1) pin30.write_digital(0) def stop(): pin28.write_digital(0) v = 500 forward() sleep(3000) left() sleep(1000) right() sleep(1000) forward() sleep(3000) stop() Um die Programme zu vereinfachen, enthält die Python-Distribution von Calliope das Modul cprover mit den oben definierten Funktionen forward(), right(), left(), stop() und setSpeed(v) (v im Bereich 0..100). |
MERKE DIR... |
| DC-Motoren drehen je nach Polarität der Spannung vor- oder rückwärts. Der Calliope hat einen Stromverstärker, der für den Betrieb eines einzelnen Motors vorgesehen ist. Werden zwei Motoren benötigt, so kann man diese entweder parallel vorwärts und rückwärts schalten oder man kann sie einzeln vorwärts, aber nicht rückwärts schalten. |
ZUSATZSTOFF |
DISTANZ MESSEN MIT INFRAROT-SENSOR |
|


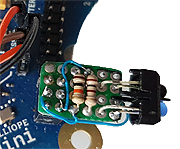
MUSTERBEISPIEL |
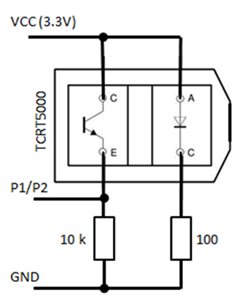
Der Calliopy soll mit seinem Infrarotsensor ein Hindernis detektieren und darauf reagieren. In deinem Beispiel wird der Roboter mit run() in Vorwärtszustand versetzt. Dabei wird in einer endlosen Wiederholungsschleife mit pin1.red_analog() der Sensorwert ständig abgefragt. Wenn der Sensorwert grösser als 100 ist , fährt fährt der Roboter 3000 Millisekunden rückwärts und danach erneut vorwärts. Der Sensor misst die Intensität des reflektierenden Lichtes, dh. je näher ein Hinderniss ist, umso grösser ist der Sensorwert. Helle Gegenstände reflektieren stärker. Du musst also den Schwellenwert an deine Situation anpassen. Unter der Verwendung des Moduls cprover ist das Programm sehr einfach: Programm: from calliope_mini import * from cprover import * run() while True: v = pin1.read_analog() if v > 100: back() sleep(3000) run() Das Modul cprover.py kannst du auf deinen Calliope herunterladen und auch in weiteren Anwendungen mit einem fahrenden Roboter verwenden. Dabei gehst du wie folgt vor: du nimmst das Programm wie üblich in den TigerJython-Editor und wählst "Tools/Modul hinunterladen". Programm: # cprover.py from calliope_mini import pin28, pin29, pin30 def forward(): pin28.write_analog(v) pin29.write_digital(1) pin30.write_digital(1) def left(): pin28.write_analog(v) pin29.write_digital(0) pin30.write_digital(1) def right(): pin28.write_analog(v) pin29.write_digital(1) pin30.write_digital(0) def stop(): pin28.write_digital(0) def move(): left() def rewind(): right() def setSpeed(speed): global v v = int(speed / 100 * 1023) setSpeed(100)
|
ZUM SELBST LÖSEN |
|


Fachliche Hinweise:
Der Befehl write_analog(v) erzeugt ein PWM-Signal (Pulse-Width-Modulation) mit der Frequenz von rund 40 kHz zwischen 0 und 100 % (bei v = 1023). Mehr dazu siehe unter micro:bit/buggy