| TigerJython4Kids | robotics |
| Deutsch English |
1. GET STARTED
![]()
YOU LEARN HERE... |
how to operate the mbRobot and create an initial robot program that you download to the robot and execute there. |
RUN THE FIRST PROGRAM |
You use the TigerJython development environment for program development. If it is not yet installed on your computer, you must first install it (download TigerJython). Start TigerJython and enter the following program in the editor window:
With the first line you import the robotics library mbrobot. With the command forward() the robot is set to move forwards and remains in this state for 2000 milliseconds. With the command stop() he is stopped.
|




SIMULATION MODE |
|
REMEMBER... |
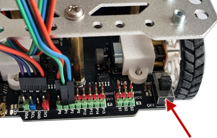
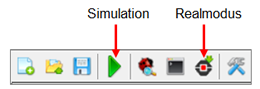
| Enter the programme code in the TigerJython editor and click on the robot button to download the programme to the mbRobot. The micro:bit of the robot must be connected to your computer via the USB cable. You must switch on the power supply before running the program. For the simulation, start the programme execution with the green arrow. |
ADDITIVE: ROBOT CALIBRATION |
What to do if the robot does not move in a straight line? Example 1: Calibration when travelling straight ahead
Example 2: Adjusting the radius for leftArc() and rightArc()
You have to determine the size of the parameters for your robot by trial and error and the line calibrate() in all programmes in which you want to achieve more precise movement. |
![]()
Warning: include(a/1-1.html): Failed to open stream: No such file or directory in /var/www/html/engl/robotik/mbrobot/loslegen.inc.php on line 222
Warning: include(): Failed opening 'a/1-1.html' for inclusion (include_path='.:/usr/local/lib/php') in /var/www/html/engl/robotik/mbrobot/loslegen.inc.php on line 222