![]()
DU LERNST HIER... |
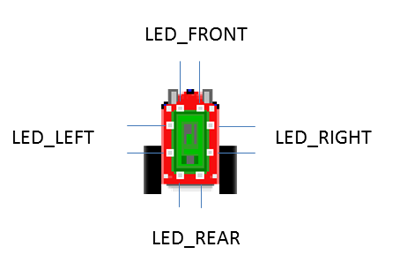
wie du die 8 farbigen LEDs ansprechen kannst, die vorne, seitwärts links, hinten und seitwärts rechts angebracht sind. Diese werden immer als ein Paar verwendet und mit den symbolischen Konstanten LED_FRONT, LED_LEFT, LED_REAR, RED_RIGHT bzw. den Zahlen 0, 1, 2, 3 identifiziert.
|
MUSTERBEISPIEL |
from raspisim import * #from raspibrick import * robot = Robot() ledFront = Led(LED_FRONT) ledLeft = Led(LED_LEFT) ledRight = Led(LED_RIGHT) ledRear = Led(LED_REAR) while not robot.isEscapeHit(): ledFront.setColor("red") Tools.delay(2000) ledFront.setColor("black") ledLeft.setColor("green") Tools.delay(2000) ledLeft.setColor("black") ledRear.setColor("blue") Tools.delay(2000) ledRear.setColor("black") ledRight.setColor("white") Tools.delay(2000) ledRight.setColor("black") robot.exit() |
MERKE DIR... |
dass du auch alle LEDs miteinander ansprechen kannst. Dazu verwendest du beim Aufruf nicht eine Objektvariable, sondern den Präfix Led. Alle LEDs mit einer bestimmten Farbe einschalten: Alle LEDs ausschalten: Beispielsweise kannst du alle LEDs wie folgt blinken lassen: from raspisim import * #from raspibrick import * robot = Robot() while not robot.isEscapeHit(): Led.setColorAll("white") Tools.delay(200) Led.clearAll() Tools.delay(200) robot.exit() |
ZUM SELBST LÖSEN |
|
![]()
Die Liste target definiert das reflektierende Objekt. Sie enthält die Koordinaten der 4 Eckpunkte relativ zum Mittelpunkt des Rechtecks. useTarget() verwendet ein Spritebild bar0.gif zur Darstellung des Objekts.