| Deutsch English |
![]()
DU LERNST HIER... |
wie du den micro:bit einsetzen kannst, um Systeme zu überwachen und gegebenenfalls Alarm auszulösen. |
WASSERSTAND ÜBERWACHEN |
|
|
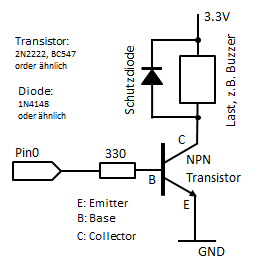
from microbit import * while True: v = pin0.read_analog() print(v) sleep(500) Ergänze deine Anlage mit einer optischen Alarmanzeige auf dem LED-Display. Wenn die einen akustischen Alarm auslösen willst, so eignet sich dazu ein Buzzer. Diesen kannst du aber nicht direkt mit dem micro:bit ansteuern, da er zuviel Strom benötigt. Am einfachsten ist es, wenn du einen kleinen Transistorverstärker baust. Diesen kannst du auch verwenden, um mit dem micro:bit andere Geräte ein- und auszuschalten, beispielsweise ein Relais oder eine Weiche deiner Modelleisenbahn. |
EINFACHER TRANSISTORVERSTÄRKER |
|
MERKE DIR... |
| Einfache Alarmanlagen kannst du leicht mit dem micro:bit als eingebettetes System aufbauen, wenn du deine handwerklichen Fähigkeiten mit etwas Elektronik- und Programmierkenntnissen kombinierst. |
ZUM SELBST LÖSEN |
|
![]()
Unter der Beschleunigung versteht man allgemein die Änderungsrate der Geschwindigkeit, eindimensional also
![]()
wo v die Geschwindigkeit ist.
Aus den drei Beschleunigungskomponenten kannst du die Winkel Pitch und Roll berechnen. Starte das folgende Programm und kippe das Board seitwärts bzw. nach vorne und hinter. Im Terminalfenster werden die Drehwinkel in Grad ausgeschrieben.
from microbit import * from math import * def getPitch(): a = accelerometer.get_values() pitch = atan2(a[1], -a[2]) return int(degrees(pitch)) def getRoll(): a = accelerometer.get_values() anorm = sqrt(a[0] * a[0] + a[1] * a[1] + a[2] * a[2]) roll = asin(a[0] / anorm) return int(degrees(roll)) while True: pitch = getPitch() roll = getRoll() print("p: " + str(pitch)) print("r: " + str(roll)) print() sleep(100)