![]()
DU LERNST HIER... |
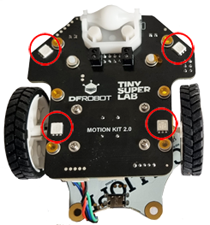
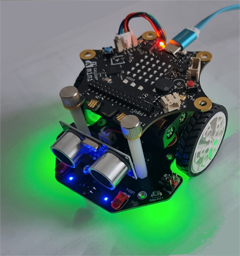
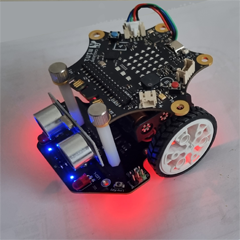
wie du die vier RGB LEDs auf der CalliMk-Platine in verschieden Farben einschalten kannst. |
MUSTERBEISPIELE |
from callimk import * rgbLED(200, 0, 0) delay(2000) rgbLED(0, 200, 0) delay(2000) rgbLED(0, 0, 200) delay(2000) rgbLED(255, 0, 255) delay(2000) rgbLED(0, 0, 0)
from callimk import * g = 10 while g <= 255: rgbLED(0, g, 0) delay(1000) g += 10 rgbLED(255, 0, 0) delay(1000) rgbLED(0, 0, 0)
from callimk import * repeat 2: rgbLED(255, 0, 0) leftArc(0.2) delay(5000) rgbLED(0, 255, 0) rightArc(0.2) delay(5000) stop() rgbLED(0, 0, 0) |
MERKE DIR... |
Mit dem Befehl rgbLED(r, g, b), wo r, g, b Zahlen zwischen 0 und 255 sind, werden die vier RGB LEDs eingeschaltet und leuchten so lange, bis eine andere Farbe eingeschaltet wird oder die LEDs mit dem Befehle rgbLEDs(0, 0, 0) abgeschaltet werden. |
ZUM SELBST LÖSEN |
|
|
![]()